1.very silent operation.
2.No need to adjust PID, and no need additional ajudst for such like properllers, the balance effect is top.
3.Support raceflight and betaflight firmware, default is BF. target:CC3D Revo
4) Use MPU6000 gyro
5) Gyro and MCU have 3.3V independent power supply
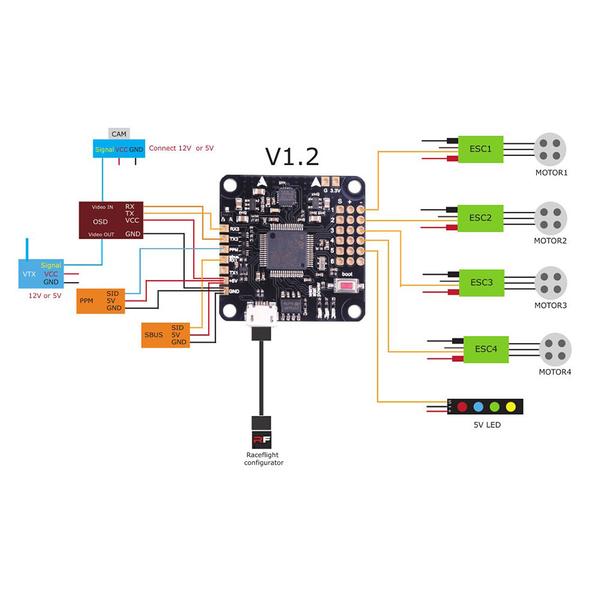
6)Has outputs for up to 6 motors (ESCs)
7)Two available hardware UART ports
8)Built in inverter for SBUS input
9)STM32F405 32-bit processor at 168MHz, 1Mb flash, 192kb ram
10)Micro USB connectivity using STM Virtual Communications Port
11)M25P16 16 Mbit, serial Flash memory, 75 MHz SPI bus interface
3.3볼트 스팩트럼 수신기 사용 가능
F4 Racing Flight Control V2
12V/5V2A BEC+PDB,2S~4S
MCU: STM32F4
MPU6000 Accelerometers and Gyroscopes
MicroUSB socket.
1x 5pin JST-SH Socket (PPM, SERIAL RX3,TX3, 5V, GND)
Weight:10g
Size(PCB):35*35mm,,30.5mm mounting holes
안녕하세요?
시카다 수입원 주)화전 하비몰입니다.
시카다 변속기 워런티 서비스와 리페어(수리) 서비스에 대한 공지입니다.
1, 제품 보증기간 1년 - 정상적으로 사용한 제품이 고장이 났을때, 주관적인 판단이 개입되겠지만, 합리적인 클래임에 대해서는 1년간 무상 교환 해드립니다.- 2, 수리 서비스 : 기체의 추락, 쇼테이지(단락)으로 인한 고장, 쇼요시간 약 2달(사유 : 고장난걸 모아서 보내야 하기때문에) 비용 개당 2만원선 택배배 별도
현명한 서비스 이용방법,
1,워런티 서비스 이용 : 악성 클래임은 이 제도의 정착을 방해해 결국 소비자들의 이익을 뺏어 갈수 있습니다. 합리적인 클래임 문화 정착을 부탁드립니다 . 2,수리서비스 이용 : 수리를 요청 후 제품이 수리되어 도착할때까지 다른 제품을 사용 하면서, 고장나는 주기를 자체 계산해 로테이션으로 돌려 쓰면 상당한 메리트가 있을것으로 생각 됩니다.
제품 좋고 서비스 좋고 가격 합리적인 시카다 변속기 많은 이용 바랍니다.
|